
“…you settle back to enjoy the ride as your car adjusts itself to the prescribed speed. You may prefer to read or carry on a conversation with your passengers—or even catch up on your office work. It makes no difference for the next several hundred miles as far as the driving is concerned.”
So begins the story entitled, “Electronic Highway of the Future,” published in the January, 1958 issue of Electronic Age, unveiling an early vision of a driverless future.
Long before there were driverless cars, there were dreams of automated highways. One of the first high-profile exhibitions of what was dubbed “hands free, feet free driving” took place at the 1939 World’s Fair in Queens, New York. In a dazzling demonstration of creative marketing, General Motors Corporation (now known simply as “GM”) designed and built the Futurama, an exquisitely detailed, small-scale depiction of what driving would be like in the year 1960. Fair-goers waited in long lines to ride through the Futurama’s miniature utopian landscape, where radio-controlled cars guided themselves on autonomic highways.

The Futurama was long on vision and short on technical details. To build working prototypes of radio-controlled cars, in the early 1950s, GM teamed up with another leading-edge company of the day, Radio Corporation of America (later known as RCA). The modern driverless vehicle is essentially a transportation robot that carries most of its intelligence on board, relying on GPS signals, stored digital maps, data from on-board sensors, and intelligent software to find its way. Back then, however, computers of the day were too large to be mounted on a moving vehicle, and too slow to process vast reams of visual and sensor data in real time. Thus began the era of the Electronic Highway.

The first Electronic Highway consisted of a miniature car that was guided by signals from a pattern of wires laid on the floor of an RCA laboratory in Princeton NJ. This small-scale laboratory prototype soon blossomed into a real-life Electronic Highway, a full-scale, 400-foot long stretch of public highway built outside of Lincoln, Nebraska. On the Electronic Highway in Nebraska, specialty-equipped cars used a system of radio controls, buried electronic circuits, and electrical wires to drive in a straight line and keep a safe distance from one another.
While the Electronic Highway was a stellar example of bold and elegant engineering, it was not scalable. The necessary electronic components cost too much to be installed into the United States’ growing network of Federal and State Highways, as RCA and GM had originally envisioned. After spending more than a decade trying to make their vision come to life, both RCA and GM moved on to commercially greener pastures.
Today, all that remains of the Electronic Highway is the lingering misperception that autonomous vehicles require a pricey and elaborate high-tech infrastructure. In reality, the opposite is true. As the science of computer vision continues to advance at breakneck speed, the most important component of physical highway infrastructure will not be buried electronic circuits or pricey traffic-control technology designed for human drivers, but low-tech white lane markers that help cue the autonomous vehicle’s visual system.
Following is the full text of the 1958 article.
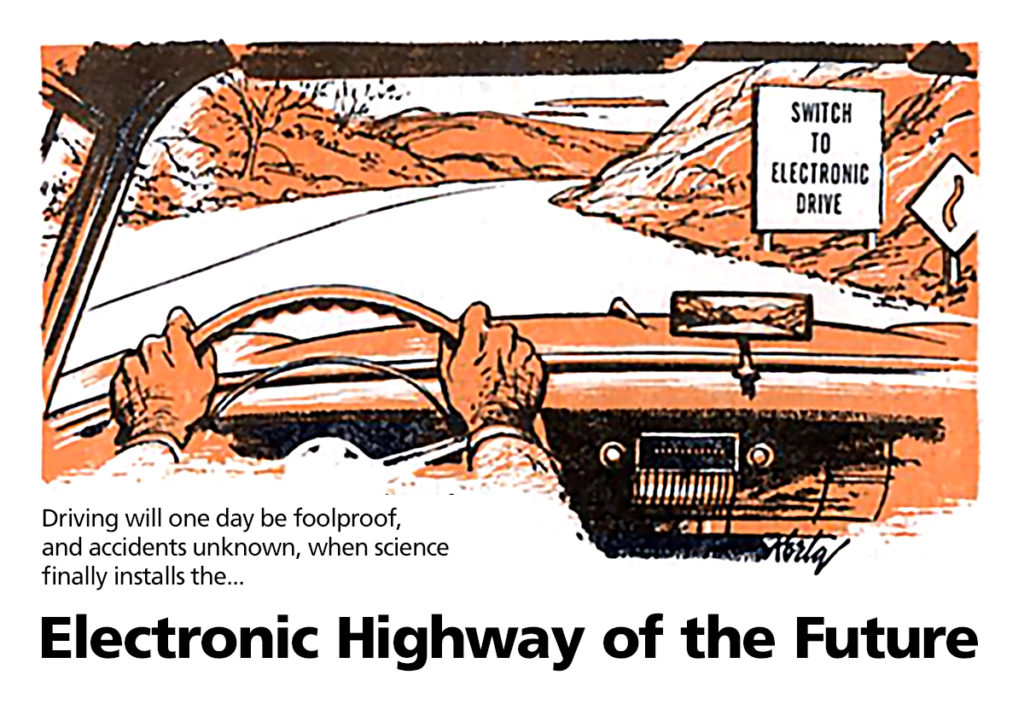 Passing the above sign as you enter the super-highway, you reach over to your dashboard and push the button marked “Electronic Drive.” Selecting your lane, you settle back to enjoy the ride as your car adjusts itself to the prescribed speed. You may prefer to read or carry on a conversation with your passengers—or even to catch up on your office work. It makes no difference for the next several hundred miles as far as the driving is concerned.
Passing the above sign as you enter the super-highway, you reach over to your dashboard and push the button marked “Electronic Drive.” Selecting your lane, you settle back to enjoy the ride as your car adjusts itself to the prescribed speed. You may prefer to read or carry on a conversation with your passengers—or even to catch up on your office work. It makes no difference for the next several hundred miles as far as the driving is concerned.
Fantastic? Not at all. The first long step toward this automatic highway of the future as successfully illustrated by RCA and the State of Nebraska on October 10, 1957, on a 400-foot strip of public highway on the outskirts of Lincoln.
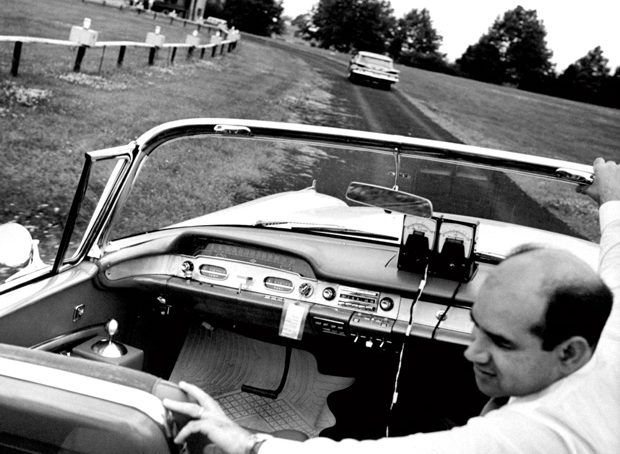
Both unequipped vehicles and a test car with special receiving equipment were used to show the immediate uses and the ultimate possibilities of electronic highway control. Coupled to a series of RCA experimental detector circuits buried in the pavement were a series of lights along the edge of the road. In the test car were special RCA radio receivers and audible and visual warning devices to simulate automatic steering and brake controls.
In a series of tests, the installation at Lincoln proved its ability to:
- Provide automatic warning to a driver following too closely behind another vehicle,
- Indicate to a driver the presence of a parked vehicle or other obstacle in the highway ahead,
- Guide a car accurately along its traffic lane even under conditions of zero visibility for the driver,
- Cause remote operation of warning lights ahead at points of merging traffic, or along the roadside for any distance ahead of or behind a moving vehicle unequipped with special equipment.
The demonstration, observed by nearly 100 state and federal highway officials, representatives of automobile manufacturers, and the press, made two major points. First, was the fact that the various elements of the system can be used immediately in conjunction with arrays of roadside and intersection lights to increase driving safety under present conditions, without requiring special equipment on cars or trucks.
Second, was the clear indication that the system as a whole can be developed without major technical complications into a fully automatic highway traffic control system.
Driving in the Future
Operating the system of the future will be a simple as it seems fantastic. From beneath the pavement, electrical signals will radiate from buried wires to be picked up by the tiny transistorized receivers built into the car. On one frequency will come the signals from the guidance cable, controlling the power steering mechanism to keep the car in its lane.
Signals on another frequency will warn of obstructions in the highway half-a-mile or a mile ahead—perhaps a stalled vehicle, or a highway maintenance crew at work. Whatever the cause, signals, picked up by another receiver in the car, will operate automatic controls that reduce your speed by letting up the accelerator, apply the power brakes, or guide the car automatically into the next lane to pass the obstruction.
Operating on a third frequency, the special highway receiver on the dashboard will pick up signals from a buried antenna and cut off the standard car radio to make an announcement of its own: “Exit Number Three for Pittsburgh area is five miles ahead. Connections at this exit with Routs 19 and 28. Please watch roadside signs for further directions.”
Approaching the exit the radio will again cut in with an announcement supplementing the roadside signs. “Exit Number Three for Pittsburgh area is two miles ahead. Motorist for Exit Three please switch off electronic drive and move to exit lane at extreme right.” The motorist will simply push a button to switch the car to manual control. He will then move into the right lane to approach the exit and turn off the superhighway.
How it Came About
Behind the Lincoln demonstration, and the further developments that are likely to come from it, is a story of imagination and enterprise in two widely separated locations. One is RCA’s David Sarnoff Research Center in Princeton, NJ. The other is the State Capitol building at Lincoln, Nebraska.
The electronic highway control system is itself the conception and development of an RCA Laboratories’ team including Leslie E. Flory, George W. Gray, and Winthrop S. Pike, working under the direction of Dr. Vladimir K. Zworykin, Honorary Vice President of RCA. It is based on a concept demonstrated by Dr. Zworykin and his associates at the Center in 1953.
At that time, the principles were successfully applied in a small-scale system in which wires laid in a pattern on the laboratory floor were used to guide and control a miniature car. It was a sufficiently fascinating “toy” to inspire a feature article by writer John Lear in Collier’s magazine.
The article sparked the imagination of Leland M. Hancock, traffic engineer in the Nebraska Department of Roads, and of his director, L.N. Ress, State Engineer. The decision was made to experiment with various aspects of the system in actual highway installations in the vicinity of Lincoln.
To accomplish their purpose, the Nebraska officials turned to the RCA Laboratories group at Princeton for the novel electronic equipment that was needed.
The opportunity that presented itself was the construction of a new main intersection of US Route 77 and Nebraska Highway 2 on the outskirts of Lincoln. As the pavement was laid, the necessary wiring was buried, preparing the ground for the experimental work, the results of which were demonstrated on October 10.

Cars with radio receivers run tests on highway equipped with buried detector circuits at Lincoln, Nebraska. RCA scientists are continuing developmental work on system.
How it Works
What the observers saw at the first public demonstration was a system comprising three basic elements:
- A sequence of detectors installed at intervals slightly greater than car length along the road, capable of reacting to the passage of cars;
- A radio warning system for following vehicles, controlled by a signal from the detectors;
- A guidance system to keep each vehicle centered in its lane.
The detectors consist of rectangular loops of wire, six by twenty feet, buried in the pavement in the traffic lane, and coupled to an associated circuit at the edge of the road. The loop carries a voltage from a high-frequency power line. Whenever a vehicle passes over the loop, the result is a variation in current which is detected by the roadside circuit. The circuit then produces an output signal that controls an indicating device such as a warning light, and at the same time switches on the radio warning system for following vehicles.
The radio warning system is simply a transistor switch and an antenna that extends back beneath the pavement from each of the detector loops for any desired length. When the detector responds to a passing vehicle, the transistor switch is closed, causing the antenna to radiate a signal.
This continues for a certain interval of time after the vehicle has passed, so that the antenna radiates, in effect, a “radio tail warning” behind cars as they move along the highway. The tail warning signals can be used to actuate warning lights along the side of the road, or they may be picked up by following cars with appropriately tuned receivers that can be used ultimately to activate automatic control of brakes.
Warning devices include left -right indicator (below mirror) and buzzer and warning lights for obstacles such as other vehicles or maintenance crews.
The guidance system is a cable laid down the center of the traffic lane beneath the pavement, carrying a signal current of yet another radio frequency. To use the continuous signal, a car is equipped with small receiving antennas mounted at either end of the front bumper or on both front fenders. These antennas are connected to a different receiver which responds when it receives two signals of differing intensities.
As long as the car is centered over the cable, nothing happens. As soon as the vehicle moves to either side, one signal increases in intensity while the other decreases, causing a response in the receiver. In the demonstration, the effect was shown on a meter in the test car; in the ultimate system, it would be used for automatic control of the steering mechanism.
A “Compatible” System
Perhaps the most telling point of the demonstration in the eyes of highway experts was the extent to which the electronic system is compatible with present highway conditions, having many applications in the near future without requiring any equipment in cars.
The point was demonstrated simply. As cars entered the test strip, a warning light automatically flashed on over a merging traffic sign 400 feet ahead, alerting drivers approaching on an adjacent road. Then, as each car moved over the buried loops, a light beside each loop was turned on automatically, tracing the passage of the car through the test area.
Dr. Zworkin pointed out that the use of lights along the roadside could provide a visual substitute for the “radio tail warning,” serving vehicles without any receiving equipment. In this way, a vehicle moving along in the fog might light a series of lights several hundred feet behind it, warning approaching cars and immediately preventing read-end collisions in fog banks – a type of accident that has involved as many as thirty cars at one time on the New Jersey Turnpike.
Introducing System
First stage: no auxiliary equipment in vehicles, but systems of warning lights activated by the buried detector units. This could be done immediately, perhaps beginning with isolated portions of the highway system.
Second stage: Some cars equipped with signal detectors which would give the driver a dashboard indication of the distance of clear roadway ahead, even under conditions of zero visibility.
Final stages: Automatic vehicle control would also be introduced on a step-by-step basis, beginning with installed equipment that would make use of signals from the guidance cable and buried antenna systems to control steering and braking.
***
Ultimately, automatic control devices would sense suitable opportunities for passing and would change routes in response to a program pre-set on an electronic computer in the vehicle. The driver would have to take over only as he left the high-speed road system.
About the Authors
 Thanks to Melba Kurman and Hod Lipson for their introduction to this feature. Melba Kurman writes and speaks about disruptive technologies. Hod Lipson is a roboticist and professor of engineering at Columbia University. They are co-authors of Driverless: Intelligent Cars and the Road Ahead.
Thanks to Melba Kurman and Hod Lipson for their introduction to this feature. Melba Kurman writes and speaks about disruptive technologies. Hod Lipson is a roboticist and professor of engineering at Columbia University. They are co-authors of Driverless: Intelligent Cars and the Road Ahead.
See their feature in ConceptCar, Intelligent Cars.
