
SEALAB I, II, and III were experimental high pressure, underwater habitats developed by the United States Navy in the late 1960s to prove the viability of saturation diving. The program illuminated the path towards extended human life in the last frontier—the deep sea.

Figure 1. US Navy Sea Lab II Crew. Former astronaut Scott Carpenter, Team One leader, is second from left in the front row.
In so-called saturation diving, the divers live in a pressurized environment, a hyperbaric environment on the surface, or an ambient pressure underwater habitat. These habitats may be maintained for up to several weeks. However, aquanauts working in these conditions are gradually decompressed to surface pressure only once, at the end of their tour of duty. By limiting the number of decompressions in this way, the risk of decompression sickness (the bends) is significantly reduced.
Why is deep sea exploration so important? Oceans hold the promise of new discoveries of the most “alien” looking life-forms—more bizarre than anything the vacuum of space will ever offer. More pragmatically, oceans offer vastly less expensive business prospects in mining, aquaculture, and marine pharmacology, as compared with space. However, more than 50 years have passed since Sea Lab I, and humans are still yet to relocate even temporarily to this most remote frontier of our own planet.
The main technological challenge here stems from the extreme ocean environment itself, which is fundamentally much more difficult to deal with than space. Saturation diving today is complicated by poorly understood but significant chronic medical risks for career saturation divers—not to mention the large, costly, and complex systems required to support a saturation dive. Scientists cannot permanently, or for long periods of time, remain under the sea, nor can they easily enter and egress the Sea Labs due to lengthy decompression requirements and associated health risks.
One of the most important problems is the development of an Extra Vehicular Activity (EVA) suit that circumvents all the problems associated with saturation diving. In order to improve the effectiveness and safety of the future man-in-the-sea program, I have been developing, in the context of my work with Vishwa Robotics and Massachusetts Institute of Technology (MIT), a deep-sea diving suit that will enable long-term exploration of the oceans by eliminating the risks associated with saturation diving.
The Technology
The two enabling technologies for such a deep-sea suit are its joints and the robotic hands. The powerful joints link together to form a highly articulated, anthropomorphic, submarine enclosure that encapsulates the human body, while also providing atmospheric breathing and pressure conditions internally. The robotic hands parallel the gloves on a space suit, but they enable superhuman strength and have to be absolutely (100%) waterproof: even the slightest leak could prove fatal to a diver. Thus, the robotic fingers are the weakest leak in a chain of myriad things that can go dangerously wrong in a high pressure, deep-sea diving suit. Therefore, everything about the robot hand, from finger joints to wrist attachments, has to be over-engineered and tightly sealed. Furthermore, because visibility in deep-sea is poor, the sense of touch is vitally important for the aquanaut—a sense that must be recreated in the robotic fingers via sophisticated haptic technologies.
The Atmospheric Diving Suits (ADS) being developed at Vishwa Robotics represent a leap forward in technological solutions to the physiological limitations faced by the aquanaut. A diver encapsulated in a highly mobile but hard exoskeleton does not require exotic mixed gases, nor is he exposed to increased pressure requiring post-dive decompression typical of saturation dives. However, current generation ADSs are extremely cumbersome and require large handling systems to launch and recover (see Figure 2). Moreover, they do not permit human-equivalent locomotion on the ocean floor, further reducing their effectiveness in deep sea exploration. What’s more, each diver has to be supported by rescue divers, thus overall exploration has to be a team effort, which adds to resource and overall mission costs. Let’s take a closer look.

Figure 2. Concept of US Navy ADS with right arm end effector upgraded to the Vishwa robot hand. This diver can then operate common handheld tools such as a drill by squeezing the trigger directly under water instead of requiring costly modifications to remote-actuate the tool.
Each end effector on the arms of the current ADS is a simple 1 DOF (Degree of Freedom) lobster claw (see Figure 2, left arm) that cannot perform complex tasks such as those done with the saturation diver’s gloved hand. This dexterity limitation has prevented underwater construction and maintenance at significant depths. Technological innovation in the fields of materials, joint design, and underwater robotic-exoskeletal appendages will be required to build a suit that more closely mimics the mobility and dexterity of a special operations frogman. To these ends, sponsored by NAVSEA and Office of Naval Research (ONR), Vishwa Robotics is developing a completely sealed underwater hand with articulated human-like fingers and thumb connected to the ADS handpod cockpit via a 2-DOF wrist. This hand enables the diver to safely operate many tools that were previously difficult or impossible to use on the current ADS. Already, with such dexterity improvements, the current bulky suit can provide a MDSU (Mobile Diving and Salvage Unit) or UCT (Underwater Construction Team) SeaBee the ability to effectively work at significant depths without the physiological hazards/limitations, and allow the operation of current underwater tools without modification. This existing testbed can be worn by divers without significant retraining or changes to the organization’s manpower or structure. And there is 100% sealing for diver safety. Equally important, due to the one-to-one correspondence between the thumb and the fingers, rookie aquanauts can get trained much more rapidly.
Along with robotic hands, the ADS suit under development at Vishwa Robotics uses specially engineered, sealed joints that enable a highly ergonomic dive environment for the future aquanaut. Other advances include a detachable and fully controllable backpackable ROV (remotely operated underwater vehicle) for assisting the diver in times of emergency, and also assisting the diver in hauling heavy stuff back to the lab.
Extensibility to Space
The design can also be made with other composite materials, thus significantly reducing mass for outer space missions. There are indeed a great many advantages of the marine robotic exoskeleton if converted to a space suit over the soft suits being used by NASA currently. One of the biggest advantages is the prevention of wear and tear to which soft suits are frequently subjected. Another advantage is reduced astronaut fatigue, since the joints maintain the internal volume nearly constant during flexion and extension of the limbs.
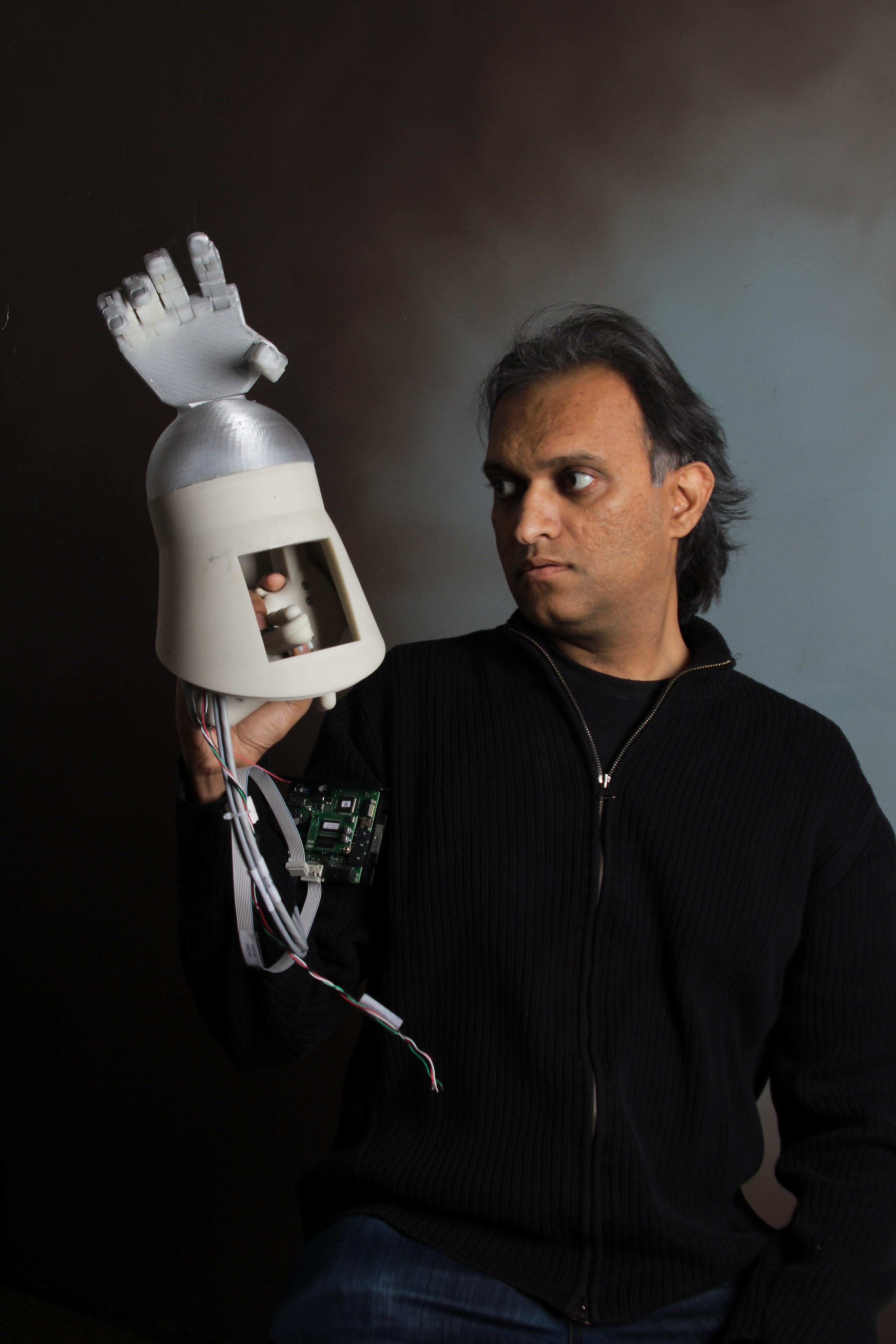
Vishwa Robotics’ Deep Sea Glove
Conclusion
In the end, the deep sea’s extreme environment calls for essentially converting a human into a super human who is equally powerful and agile in undersea missions. Vishwa Robotics scientists are engineering such better-than-biology capabilities in the ADS joints and fingers, thus providing super human capabilities to the Navy Diver who is currently limited to such capabilities only in a rubber suit. The next generation capabilities are being tested directly via multiple tank dives in our Boston facilities and other Navy locations around the country. NAVSEA and the Office of Naval Research (ONR) continues to research advanced robotics and marine exoskeleton technology that will protect the Navy Diver and enhance the capability of his underwater work. We believe that this is the future of mankind, and are excited to be working on it today.
About the Author
Bhargav Gajjar is the founder of bioinspired robotics company Vishwa Robotics and also a robotics scientist at Massachusetts Institute of Technology (MIT). Previously he was a visiting researcher at NASA Kennedy Space Center. He has four different academic backgrounds including Physics, Mechanical engineering, Electrical Engineering and Aerospace Engineering. His robotics research has been funded by all the branches of United States Department of Defense (Army, Navy, Airforce) as well as DARPA and numerous national and international private commercial businesses.
