

Autonomous Driving: How Safe is Safe Enough?
Thoughts by Toyota Executive Technical Advisor and CEO of Toyota Research Institute
 My thoughts here reflect on findings from a few key research projects that we and our partners have been conducting this past year at Toyota Research Center (TRI). To provide a bit of context, TRI’s mission is focused on Artificial Intelligence and includes four goals:
My thoughts here reflect on findings from a few key research projects that we and our partners have been conducting this past year at Toyota Research Center (TRI). To provide a bit of context, TRI’s mission is focused on Artificial Intelligence and includes four goals:
- First, to greatly enhance vehicle safety and someday create a car incapable of causing a crash.
- Second, to greatly increase mobility access for those who cannot drive.
- Third, to heavily invest in robotics to move people not just across town, but in their home, from room to room.
- And finally, to accelerate discovery in materials science by applying techniques from artificial intelligence and machine learning.
My thoughts are framed by a question designed to offer clarity and provoke discussion on just how complicated this business of autonomous mobility really is. The question I’d like to explore with you is: How safe is safe enough?
Society tolerates a lot of human error. We are, after all, “only human.” But we expect machines to be much better. Last year, there were about 35,000 fatalities on US highways—all involving vehicles controlled by human drivers. Every single one of those deaths is a tragedy.
What if we could create a fully autonomous car that was “as safe, on average” as a human driver. Would that be safe enough? In other words, would we accept 35,000 traffic fatalities a year in the US at the hands of a machine if it resulted in greater convenience, less traffic, and less impact on the environment? Rationally, perhaps the answer should be yes. But emotionally, we at TRI don’t think it is likely that being “as safe as a human being” will be acceptable. However, what if the machine was twice as safe as a human-driven car and 17,500 lives were lost in the US every year? Would we accept such autonomy then?
Historically, humans have shown nearly zero-tolerance for injury or death caused by flaws in a machine. And yet we know that the artificial intelligence systems on which our autonomous cars will depend are presently and unavoidably, imperfect. So… how safe is safe enough?
In the very near future, this question will need an answer. We don’t yet know for sure. Nor is it clear how that standard will be devised. And by whom. And will it be the same globally?
One standard that is already in place is the SAE International J3016, revised just last September that defines five levels of driving automation. I want to review this standard with you because there continues to be a lot of confusion in the media about it.
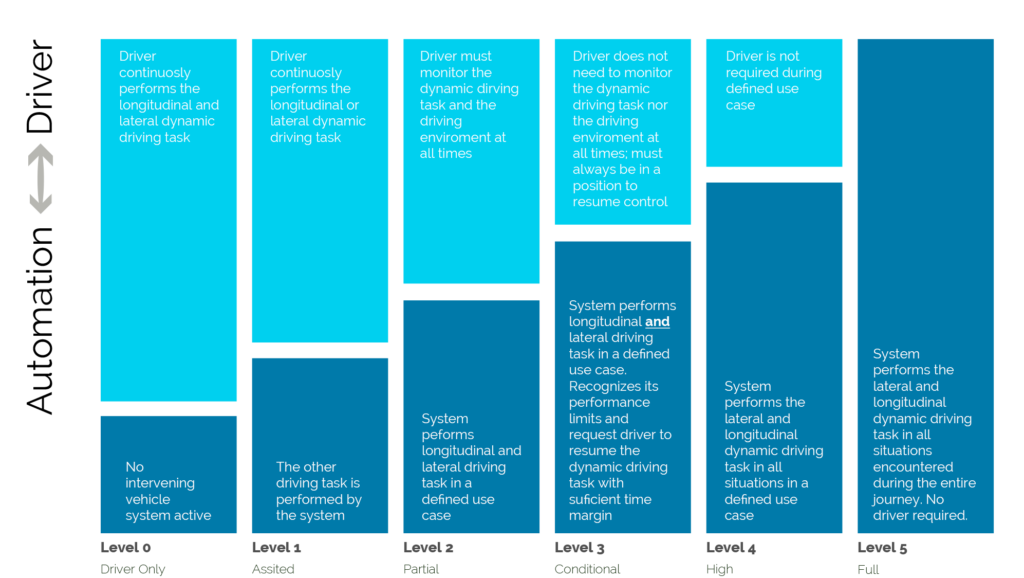
Image courtesy of SAE International.
All car makers are aiming to achieve level 5, where a car can drive fully autonomously under any traffic or weather condition in any place and at any time. I need to make this perfectly clear: This is a wonderful goal. However, none of us in the automobile or IT industries are close to achieving true level 5 autonomy.
Collectively, our current prototype autonomous cars can handle many situations. But there are still many others that are beyond current machine competence. It will take many years of machine learning and many more miles than anyone has logged of both simulated and real-world testing to achieve the perfection required for Level 5 autonomy.
But there is good news. SAE Level 4 autonomy is ALMOST level 5, but with a much shorter timetable for arrival. Level 4 is fully autonomous except that it only works in a specific Operational Design Domain, like the MCity test facility on the campus of the University of Michigan.

Photo courtesy of University of Michigan.
Restrictions could include limited areas of operation, limited speeds, limited times of day, and only when the weather is good.
When company A, or B … or T says it hopes to have autonomous vehicles on the road by early 2020s, level 4 is the technology they are probably referring to. TRI believes it is likely that a number of manufacturers will have level 4 autonomous vehicles operating in specific locations within a decade.
Level 4 autonomy will be especially attractive and adaptable for companies offering Mobility as a Service in such forms as ride-sharing and car-sharing, as well as inner-city last-mile models. In fact, Mobility as a Service may well offer the best application for bringing Level 4 to market sooner, rather than later.
Moving down the ladder, Level 3 is a lot like level 4, but with an autonomous mode that at times may need to hand-off control to a human driver who may not be paying attention at the time. Hand-off, of course, is the operative term—and a difficult challenge.
In level 3, as defined by SAE, the autonomy must ensure that if it needs to hand off control of the car it will give the driver sufficient warning. Additionally, level 3 autonomy must also ensure that it will always detect any condition requiring a hand-off. This is because in level 3, the driver is not required to oversee the autonomy, and may instead fully engage in other tasks.
The term used by SAE when the vehicle’s system cannot handle its dynamic driving tasks, is a request to intervene. The challenge lies in how long it takes a human driver to disengage from their texting or reading once this fallback intervention is requested, and also whether the system can ensure that it will never miss a situation where a hand-off is required.
Considerable research shows that the longer a driver is disengage from the task of driving, the longer it takes to re-orient. Furthermore, at 65 miles per hour, a car travels around 100 feet every second. This means that to give a disengaged driver 15 seconds of warning, at that speed the system must spot trouble, about 1500 feet away or about 5 football fields ahead. That’s extremely hard to guarantee, and unlikely to be achieved soon. Because regardless of speed, a lot can happen in 15 seconds, so ensuring at least 15 seconds of warning is very difficult. In fact, it is possible that level 3 may be as difficult to accomplish as level 4.
This brings us to level 2, perhaps the most controversial right now because it’s already here and functioning in some cars on public roads. In level 2, a vehicle hand-off to a human driver may occur at any time with only a second or two of warning. This means the human driver must be able to react, mentally and physically, at a moment’s notice.
Even more challenging is the requirement for the Level 2 human driver to always supervise the operation of the autonomy taking over control when the autonomy fails to see danger ahead. It’s sort of like tapping on the brake to disengage adaptive cruise control when we see debris in the road that the sensors do not detect. This can and will happen in level 2 and we must never forget it.
Human nature, not surprisingly, remains one our biggest concerns. There are indications that many drivers may either under-trust or over-trust a system. When someone over-trusts a level 2 system’s capabilities, they may mentally disconnect their attention from the driving environment and wrongly assume the level 2 system is more capable than it is. We at TRI worry that over-trust may accumulate over many miles of handoff-free driving.
Paradoxically, the less frequent the hand-offs, the worse the tendency to over-trust may become. And there is also evidence that some drivers may deliberately test the system’s limits, essentially misusing a device in a way it was not intended to be used.
This is a good time to address situational awareness and mental attention. It turns out that maintaining awareness while engaged in monitoring tasks has been well-studied for nearly 70 years. Research psychologists call it the “Vigilance Decrement.”
During World War Two, it became clear that radar operators looking for enemy movement became less effective as their shift wore on, even if they kept their eyes on the task. In 1948, Norman Mackworth wrote a seminal paper called “The breakdown of vigilance during prolonged visual search.” The experiment he performed used a clock that only had a second hand that would occasionally and randomly jump by two seconds. Turns out that, even if you keep your eyes on the MacWorth clock, as this graph shows, your performance at detecting two-second jumps will decrease in proportion to how long you do it.
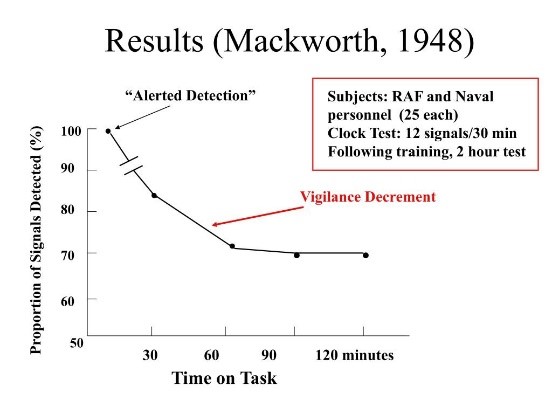
Okay, so how do you think you would do at this task for two hours? Are you likely to remain vigilant for a possible hand-off of the Level 2 car’s autonomy? Does this body of evidence mean that level 2 is a bad idea? Some companies have already decided the challenges may be too difficult, and have decided to skip levels 2 and 3.
As it turns out we are finding evidence that some things—texting not included—seem to reduce vigilance decrement. We are finding that some mild secondary tasks may actually help maintain situational awareness. For example, long-haul truck drivers have extremely good safety records, comparatively. How do they do it?
Perhaps because they employ mild secondary tasks that help keep them vigilant. They talk on two-way radios and may scan the road ahead looking for speed traps. And I bet almost all of us have listened to the radio as a way of staying alert during a long drive. Experts have divided opinions on whether that is a good idea or a bad one.
What we do know for sure is that as we move forward towards the ultimate goal of full autonomy, we must strive to save as many lives as possible in the process. Because, it will take decades to have a significant portion of the US car fleet functioning at Level 4 and above. That’s why TRI has been taking a two-track approach, simultaneously developing a system we call Guardian, designed to make human driving safer, while working on Level 2 through Level 5 systems that we call Chauffeur.
Much of the work in hardware and software that we are developing to achieve Chauffeur, is also applicable to Guardian. And visa-versa. In fact, the perception and planning software in Guardian and Chauffeur are basically the same. The difference is that Guardian only engages when needed, while Chauffeur is engaged all of the time during an autonomous drive.
One can think of anti-lock brakes, vehicle stability control, and automatic emergency braking as early forms of Guardian. When it arrives, it will be a hands-on-the-wheel, eyes-on-the-road, only-when-needed system that merges vehicle and human situational awareness. In Guardian, the driver is meant to be in control of the car at all times except in those cases where Guardian anticipates or identifies a pending incident and briefly employs a corrective response. Depending on the situation, Guardian can alert the driver with visual cues and audible alarms, and if necessary influence or control speed and steering.
Like, Yui, our Concept i agent, Guardian employs artificial intelligence and becomes smarter and smarter through both first-hand data-gathering experience and by intelligence shared via the cloud. Over time, we expect Guardian’s growing intelligence will allow it to sense things more clearly and quickly process and anticipate faster and respond more accurately in a wider array of situations.
Every year cars get safer. One reason is because every year, automakers equip vehicles with higher and higher levels of active safety. In ever-increasing numbers, vehicles are already being entrusted to sense a problem, choose a course of action, and respond, assuming, for brief periods, control of the vehicle. And that brings me back to the Concept i.
At TRI, we think that Yui, the Concept-i agent, might not only be a way to engage and provide useful advice: we think it might also be a way to promote the driver’s continued situational awareness using mild secondary tasks to promote safety. We’ve only begun our research to find out exactly how that would work.
Perhaps Yui could engage the driver in a conversation that would reduce the vigilance decrement the way talking on the two-way radio or looking for speed traps seems to do with truck drivers. We think the agent might even be more effective, because the Yui would be coupled to the autonomy system, which would be constantly monitoring the car’s environment, inside and out, merging human and vehicle situational awareness. We’re not sure, but we aim to find out.
Toyota is involved in many aspects of making future cars safer and more accessible. Yui and Concept-i represent a small part of that work. But it has the potential for being more than a helpful friend. It may have the potential to become the kind of friend that looks out for you, and keeps you safe—a guardian, as well as a chauffeur.
Our goal is to someday create a car that will never be responsible for causing a crash, whether it is driven by a human being or by a computer. And Concept-i may become a key part of that plan.
About Dr. Gill Pratt, CEO, Toyota Research Institute, Inc. (TRI)
Before joining Toyota, Dr. Gill Pratt served as a program manager in the Defense Sciences Office at the US Defense Advanced Research Projects Agency (DARPA) from January 2010 through August 2015.
Dr. Pratt’s primary interest is in the field of robotics and intelligent systems. Specific areas include interfaces that significantly enhance human/machine collaboration, mechanisms and control methods for enhanced mobility and manipulation, low impedance actuators, and the application of neuroscience techniques to robot perception and control.
He holds a Doctor in Philosophy in electrical engineering and computer science from the Massachusetts Institute of Technology (MIT). His thesis is in the field of neurophysiology. He was an Associate Professor and Director of the Leg Lab at MIT. Subsequently, he became a Professor at Franklin W. Olin College, and before joining DARPA and then Toyota, was Associate Dean of Faculty Affairs and Research. Dr. Pratt holds several patents in series elastic actuation and adaptive control.
Previous

